隧洞检测
目前对于绝大多数的水务、水电及矿业用户来说,准确地进行水工隧道、竖井及水下洞穴完整性扫测是一项极富挑战的任务。虽然把隧洞里的水放掉是一种解决方法,但这可能会因为压强对这些设施造成其他的损坏。此外,放水操作也是费用非常高的一种方式,某些情况下会造成生产力的损失。近些年也有一些单位开始使用ROV进行管道内部图像及声呐数据采集,但由于管道内的低可视度,摄像头采集的视频数据通常是不完整的或是不清晰的。
平台
ROV
难点:隧道深需要考虑缆长,如果搭载多波束或三维声呐之类的大数据量输入需要考虑传输能力
短距离或入口较多的隧洞可以使用小ROV,比如BlueROV2或VideoRay Pro这样的,BlueROV2可搭载电池,但是跑的距离要看电池的大小,VideoRay Pro便携,但是需要水面供电,缆长受限。
搭载设备
单波束图像声呐
优点:便宜,对ROV的搭载能力和供电通讯等都要求较低
缺点:单线扫测,ROV必须在扫描中保持固定位置;连续扫测,需要螺旋形剖面扫描,容易漏扫
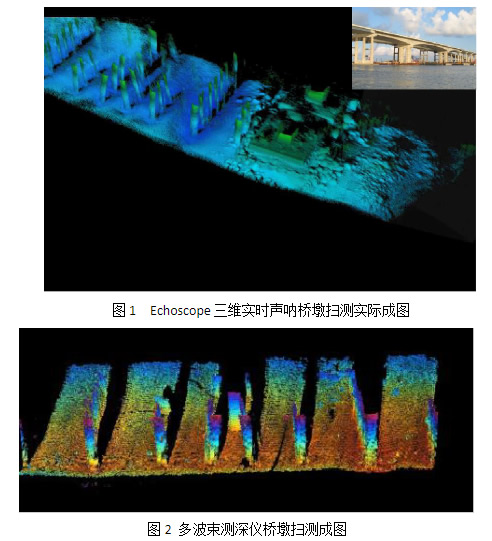
多波束测深仪
优点:分辨率高,覆盖全面,直径较大隧洞也没问题
缺点:想要覆盖360度只能集成多个探头,对ROV负载能力、供电、通讯都有非常高的要求,只能使用大型ROV,多套多波束及大ROV费用高昂
360度图像声呐
分两种:
- 机械扫描式,代表产品Impact Subsea的ISS360,这种更适合用于ROV导航,不适合做隧道检测
数据不连续,需要多次往返补充数据,不适合艰难的作业环境
- 多波束多探头式,代表产品Teledyne Blueview的T2250和Imagenex的DT360,专为隧道检测设计
减少了作业次数,最大化采集的数据质量,适合绝大多数的隧洞扫描
技术难点
- 隧道内部缺少GPS信号,也无法使用USBL定位,INS比较贵,也增加ROV负荷
一般采用电缆计数器和软件解决,输入进出隧道口的GPS定位坐标、隧道长度,脐带缆长度,所需时长和ROV速度,软件可以计算ROV定位
- 长隧道ROV最好配备电池,可以减少脐带缆体积,减少功率消耗,减小绞车体积
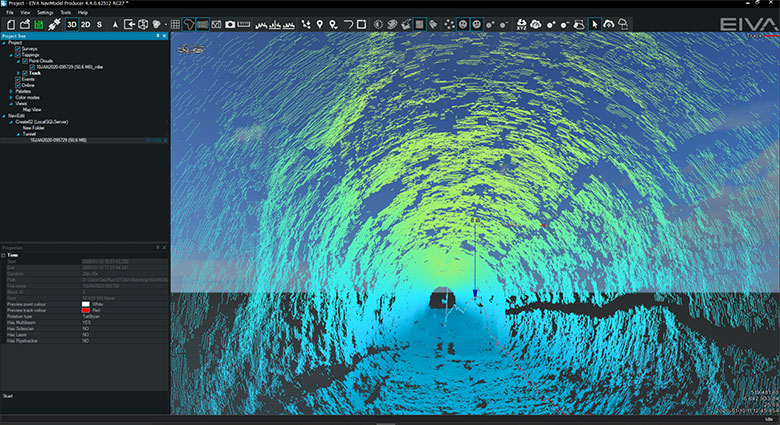
- 数据拼接软件:T2250一般配PDS2000做后处理,其他可用EIVA的NaviSuite Mobula,既支持小型ROV的导航使用,也可以做数据后处理和拼接